Менеджмент - это управление организацией, функционирующей в условиях рыночной экономики.
Методы решения задач синтеза оптимальных систем
Принцип оптимальности будет выполняться, если, не думая и им, как пройден начальный участок пути, в каждый момент времени бегун будет строить свое поведение так, чтобы оставшийся путь пройти за минимальное время, оценивая, пополню, свое состояние в этот момент.
Указанный пример помогает понять другую формулировку принципа оптимальности:
Оптимальная стратегия определяется лишь состоянием системы в настоящий момент и не зависит от того, как система пришла в данную точку.
Рассмотрим метод динамического программирования на примере [3].
С помощью метода динамического программирования решим задачу об оптимальном быстродействии.
Пусть объект описывается линейным дифференциальным уравнением
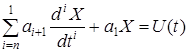 (1.4.3.2)
(1.4.3.2)
Обозначим
![]() ;
; ![]() ; …;
; …;  ; …(i =1, 2…n-1).
; …(i =1, 2…n-1).
Представим (1.4.2) в виде системы n-уравнений первого порядка
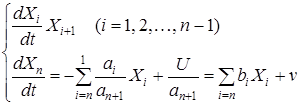 (1.4.3.3)
(1.4.3.3)
где:  ;
;  .
.
Пусть на v наложено ограничение вида
![]() . (1.4.3.4)
. (1.4.3.4)
Необходимо найти оптимальное управление v(t), обеспечивающее минимальное время Т перемещения изображающей точки из начального положения Х1(0), . . ., Хn(0) (радиус-вектор ![]() ) в начало координат фазового пространства.
) в начало координат фазового пространства.
Если положить в (1.4.3) Т = N∆t, Xi(К) = Xi(К∆t), v(К) = v(К∆t), то уравнение (1.4.3.3) запишется в конечных разностях
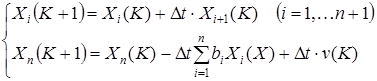 (1.4.3.5)
(1.4.3.5)
Рассмотрим минимальное время попадания в некоторую коночную точку ![]() с координатами
с координатами
![]() (i =1,2. , N). (1.4.3.6)
(i =1,2. , N). (1.4.3.6)
Минимальное время Т попадания в эту точку зависит лишь от начальных условий X1(0), X2(0), . . ., Хп (0), то есть Т= Т[![]() (0)]. Переход из начального положения на один шаг занимает время
(0)]. Переход из начального положения на один шаг занимает время ![]() , после чего вектор
, после чего вектор ![]() (0) будет заменен вектором
(0) будет заменен вектором ![]() (l), который зависит от v(0). Минимальное время попадания из точки
(l), который зависит от v(0). Минимальное время попадания из точки ![]() (1) в точку
(1) в точку ![]() (N) будет функцией только от
(N) будет функцией только от ![]() (1): Т=Т[
(1): Т=Т[![]() (1)], а общее время равно
(1)], а общее время равно![]() , что можно записать так
, что можно записать так
![]() .
. ![]() (1.4.3.7)
(1.4.3.7)
![]()
![]()
Если в уравнении (1.4.3.7) ![]() (1) записать согласно (1.4.3.4), то получим
(1) записать согласно (1.4.3.4), то получим
 (1.4.3.8)
(1.4.3.8)
Если принять, что Т - дифференцируемая функция переменных Xi(0), то, раскладывая второе слагаемое в правой части (1.4.3.8) в ряд по степеням Xi(0) и отбрасывая слагаемые выше первого порядка, уравнение (1.4.3.8) можно записать так
![]()
![]() (1.4.3.9)
(1.4.3.9)
 ,
,
где ![]() - остаточный член, порядок малости которого выше
- остаточный член, порядок малости которого выше ![]() . В уравнении (1.4.9) от v(0), по которому идет минимизация, зависит только последнее слагаемое в фигурной скобке, поэтому знак минимизации можно отнести только к этому члену, при этом T[X1(0), . . ., Хп(0)] и обеих частях уравнения взаимно уничтожится. Разделим теперь уравнение (1.4.3.9) на
. В уравнении (1.4.9) от v(0), по которому идет минимизация, зависит только последнее слагаемое в фигурной скобке, поэтому знак минимизации можно отнести только к этому члену, при этом T[X1(0), . . ., Хп(0)] и обеих частях уравнения взаимно уничтожится. Разделим теперь уравнение (1.4.3.9) на ![]() и устремим
и устремим ![]() к нулю, так как
к нулю, так как ![]() имеет более высокий порядок малости, чем
имеет более высокий порядок малости, чем ![]() . В результате получим
. В результате получим